HW2 <<
Previous Next >> Midterm
HW3
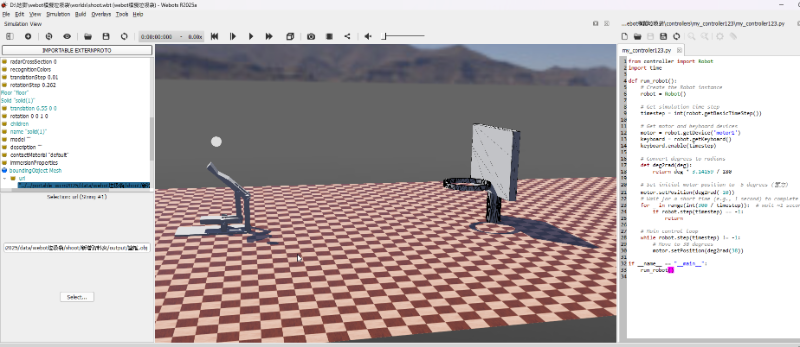
HW3 (20%):建立 Webots 桌上籃球遊戲機模擬系統
hw3繪製零件
/downloads/41223215 shooter.7z
https://youtu.be/DddqK8xxv5s 半成品模擬影片
https://youtu.be/5rvXEyfOqPw 完成品模擬影片
https://youtu.be/EJ3XKhpBrUM webot製作
/downloads/shooter-2.7z檔案
過程
sovlespace繪製出零件 繪製出設計圖 再根據設計圖的形狀組配
組配完進行拆解轉檔(obj)(拆解過程會把尺寸縮小0.01倍)
進入webot 建robot 建出三個子特徵 solid(base) 兩個hingejoint(一個進行組裝 一個鎖點)
組裝過程續注意座標軸(會根據你繪圖起始的地方做原點) 可以進入sovlespace進行測量
測量鎖點點位 過程跟前面四連桿一樣 可以在過程中進行測試 看看點位有沒有準
鎖好之後模擬(我有發現老師給的設計圖因為角度會讓球沒辦法射那麼遠 所以我自己改良了程式 在發射前程式會先畜力)
加入球體(shape) 給定物理性質
加入地板(floor)
加入籃框(我在畫籃框時 匯入webot有個問題 因為沒有轉檔(沒必要)所以尺寸是正常的100倍 所以我自己又改了老師的分解檔案 去掉拆開的部分 只保留鎖小跟轉檔的能力)
之後模擬就成功了
以下為鎖小功能py檔
#!/usr/bin/env python
# -*- coding: utf-8 -*-
"""
STL to OBJ converter with scaling support
"""
import struct
import numpy as np
from pathlib import Path
class STLConverter:
def __init__(self, filename, scale=0.001):
self.filename = filename
self.scale = scale
self.is_binary = self._check_if_binary()
def _check_if_binary(self):
with open(self.filename, 'rb') as f:
header = f.read(5).decode('utf-8', errors='ignore')
return not header.startswith('solid')
def _read_binary_stl(self):
with open(self.filename, 'rb') as f:
f.seek(80)
triangle_count = struct.unpack('I', f.read(4))[0]
triangles = []
normals = []
for _ in range(triangle_count):
nx, ny, nz = struct.unpack('fff', f.read(12))
normals.append([nx, ny, nz])
triangle = []
for _ in range(3):
x, y, z = struct.unpack('fff', f.read(12))
triangle.append([x * self.scale, y * self.scale, z * self.scale])
triangles.append(triangle)
f.seek(2, 1)
return np.array(triangles), np.array(normals)
def _read_ascii_stl(self):
triangles = []
normals = []
current_triangle = []
with open(self.filename, 'r') as f:
for line in f:
line = line.strip()
if not line:
continue
parts = line.split()
if not parts:
continue
if parts[0] == 'facet' and parts[1] == 'normal':
normals.append([float(parts[2]), float(parts[3]), float(parts[4])])
elif parts[0] == 'vertex':
current_triangle.append([
float(parts[1]) * self.scale,
float(parts[2]) * self.scale,
float(parts[3]) * self.scale
])
elif parts[0] == 'endfacet':
if current_triangle:
triangles.append(current_triangle)
current_triangle = []
return np.array(triangles), np.array(normals)
def _write_mtl(self, filename, material_name):
with open(filename, 'w', encoding='utf-8') as f:
f.write(f"newmtl {material_name}\n")
f.write("Ka 0.2 0.2 0.2\n")
f.write("Kd 0.8 0.8 0.8\n")
f.write("Ks 0.5 0.5 0.5\n")
f.write("Ns 50.0\n")
f.write("d 1.0\n")
f.write("illum 2\n")
def _write_obj(self, filename, triangles, normals):
vertex_dict = {}
vertex_list = []
normal_list = []
faces = []
for triangle, normal in zip(triangles, normals):
face_indices = []
for vertex in triangle:
vertex_tuple = tuple(vertex)
if vertex_tuple not in vertex_dict:
vertex_dict[vertex_tuple] = len(vertex_list) + 1
vertex_list.append(vertex)
face_indices.append(vertex_dict[vertex_tuple])
normal_list.append(normal)
faces.append(face_indices)
material_name = filename.stem
mtl_filename = filename.with_suffix('.mtl')
with open(filename, 'w', encoding='utf-8') as f:
f.write(f"mtllib {mtl_filename.name}\n")
f.write(f"usemtl {material_name}\n\n")
for v in vertex_list:
f.write(f"v {v[0]} {v[1]} {v[2]}\n")
for n in normal_list:
f.write(f"vn {n[0]} {n[1]} {n[2]}\n")
for i, face in enumerate(faces):
f.write(f"f {face[0]}//{i+1} {face[1]}//{i+1} {face[2]}//{i+1}\n")
self._write_mtl(mtl_filename, material_name)
def convert(self, output_path):
if self.is_binary:
triangles, normals = self._read_binary_stl()
else:
triangles, normals = self._read_ascii_stl()
output_path = Path(output_path)
output_path.parent.mkdir(parents=True, exist_ok=True)
self._write_obj(output_path, triangles, normals)
print(f"轉換完成:{output_path}")
print(f"材質檔:{output_path.with_suffix('.mtl')}")
# 使用範例
try:
input_stl = "籃框.stl"
output_obj = "output/籃框.obj"
scale = 0.005
converter = STLConverter(input_stl, scale=scale)
converter.convert(output_obj)
except Exception as e:
print(f"錯誤: {e}")
以下為畜力控制器
from controller import Robot
import time
def run_robot():
# Create the Robot instance
robot = Robot()
# Get simulation time step
timestep = int(robot.getBasicTimeStep())
# Get motor and keyboard devices
motor = robot.getDevice('motor1')
keyboard = robot.getKeyboard()
keyboard.enable(timestep)
# Convert degrees to radians
def deg2rad(deg):
return deg * 3.14159 / 180
# Set initial motor position to -5 degrees (蓄力)
motor.setPosition(deg2rad(-10))
# Wait for a short time (e.g., 1 second) to complete the back movement
for _ in range(int(300 / timestep)): # wait ~1 second
if robot.step(timestep) == -1:
return
# Main control loop
while robot.step(timestep) != -1:
# Move to 38 degrees
motor.setPosition(deg2rad(38))
if __name__ == "__main__":
run_robot()
HW2 <<
Previous Next >> Midterm